Regular Talk #1Regular Talk #2Regular Talk #3Regular Talk #4Regular Talk #5
Regular Talk No.1: 12. Comparing cost functions for the optimal control of robotic manipulators using Pontryagin’s Maximum Principle
Authors:
- Hedy César Ramírez de Ávila
- Sergio Morales López
- Juan Antonio Rojas Quintero
- Eusebio Bugarin Carlos
Regular Talk No.2: 19. Regulación de posición usando control PID con compensación de gravedad adaptable para robots manipuladores
Authors:
- Marco Antonio Moran Armenta
- Jorge Alberto Montoya Cháirez
- Eduardo Javier Moreno Valenzuela
- Ricardo Ramon Pérez Alcocer
Regular Talk No.3: 22. Study of performances of manipulators using Jacobian matrices homogenized bydifferent approaches
Authors:
- Daniel Roberto Soto-Delgado
- Jose Alfonso Pamanes-Garcia
- Julio César Rodríguez-Cervantes
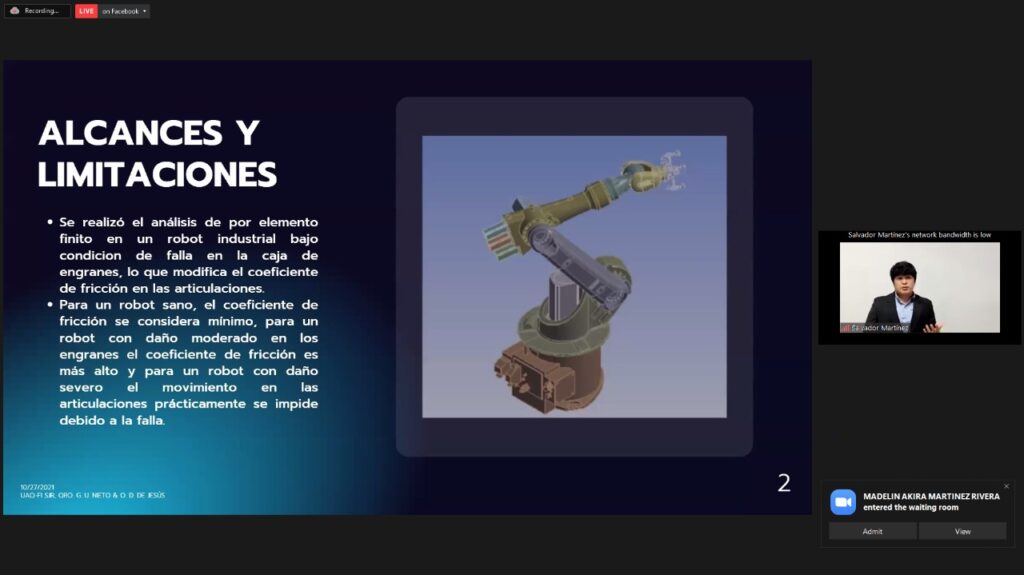
Regular Talk No.4: 16. Análisis por Elemento Finito de un Robot Industrial de 6-GDL Bajo Condición de Falla
Authors:
- Salvador Martínez-Cruz
- Gerardo U Nieto-Sanchez
- David De Jesús Díaz
- Luis A. Morales-Hernández
Regular Talk No.5: 23. Optimal Motions of a Welding Robot for Cooperative Tasks with a 2 DOF Positioner
Authors:
- Oscar Isaac Santellano-Juarez
- José Alfonso Pámanes-García
- José de Jesús Pámanes-García