Regular Talk #1Regular Talk #2
Regular Talk No.1: 13. Robust stabilization of an inverted cart-pendulum: A second order continuous slidingmode approach
Authors:
- Samy Kharuf Gutierrez
- Alejandra Ferreira de Loza
- Luis T. Aguilar
- Luis N. Coria
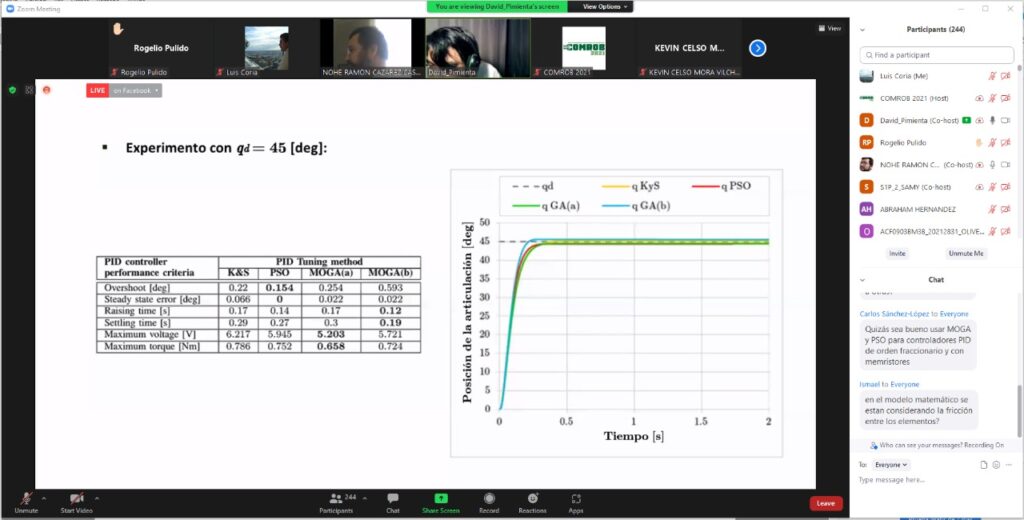
Regular Talk No.2: 3. PID tuning using MOGA for joint position regulation of a pendular device
Authors:
- David Pimienta
- Jesús Sandoval
- Marco Castro
- Iliana Castro